
こんにちは。今の時期は学生さんは受験の真っ只中ですね。電車で通勤していると今日が試験とおぼしき学生さんも結構見かけました。受験は人生を左右する大きなターニングポイントとはよく言いますが、仮に失敗しても悲観や絶望をすることは全くないと思います。
自らの望んでいない道に行ったとしても、それがどう影響してくるか分からないのが人生です。その道で今後の人生に多大な影響を与えてくれる人物との出会いがあるかもしれませんし、そこに進んだからこそ活きてくる経験があるかもしれません。正に「塞翁が馬」です。
人生で自分が経験してきた点と点は、いつか一本の線で繋がる時が間違いなく来ますので「あの時あの道に行ったから今の自分があるんだ」と思える時は必ずきます。人生は明るいものなので常に前向きにいきたいものですね。
繰返し作業を行う不整地運搬車を自動化
本日は土木工事現場の不整地で使われている運搬車を、IoT技術を使用して自動走行させる技術のご紹介。
株式会社熊谷組、株式会社KATO HICOM、JMUディフェンスシステムズ株式会社の3社での共同開発となります。
運転自動化の背景
一般的に土木工事の現場では、土砂の運搬における経路は同一経路で運搬することがほとんど。同じ経路を繰り返し繰り返し往復するだけの作業を行っているような状態。
単調な作業の繰り返し状態なので、運転手の肉体的疲労の蓄積や集中力の低下などの精神的な疲れも溜まりやすい作業と言えます。不整地での運転なので危険な場所も多く、疲れのある状態では事故の危険性があります。

高速道路でも単調な道だと睡魔が襲ってくるように、繰り返し同じルートを運転していると、慣れから集中力が低下してしまうのは有り得る話です。
それを解決すべく、今回の自動運転技術の開発に至ったということです。安全性の向上も省力化による生産性の向上もできるので、まさに自動運転が必要な現場と言えるでしょう。
システムの概要
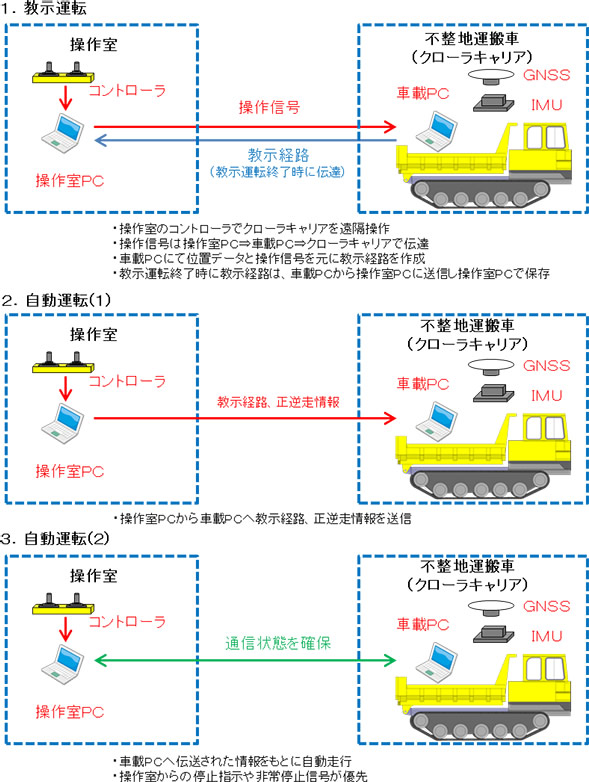
この自動運転に関しては、目的地を登録したらいきなり自動で運転を開始するというものではありません。まずオペレーターが離れた場所にある操作室から、走行状況をカメラの映像で確認しながら、積載場所から目的地の搬出場所まで遠隔操作で運転(教示運転)をします。

出典:熊谷組
その操作した内容をシステムに記憶させ、以降から自動運転ができるという形になっています。
出典:熊谷組
走行実験の結果
このシステムの実運用に向けて、阿蘇大橋地区斜面防災対策工事の現場にて実際に試験走行をおこなったそうです。

出典:熊谷組
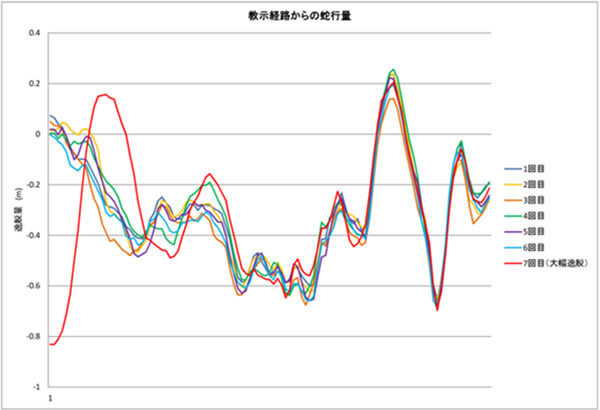
その結果、教示した経路に対してのズレとなる蛇行量は平均で30cm、最大70cmという結果。
出典:熊谷組
1~7回目まで結果がグラフに示されていますが、ほぼ見事に同じ傾向が出ていますね。1つ大きくズレている7回目の赤い線は、発車する位置を大幅にずらしたことによるものだそうです。
発車位置さえ合わせておけば、ほぼ安定した運行結果が得られるということで間違いないでしょう。
まとめ
高速道路で自動車のセンサーなどを使った自動運転技術などは良く聞きますが、同じ形がない、道路もない現場で自動運転をする場合には、教示運転を記録させてそれを反復させるというやり方は理にかなっていると思います。
運搬の為の運転手が必要なくなり、運転手は別の業務に集中できます。安全も確保されるので良いことづくめですね。