
こんにちは。昨日構造物の床面調査を効率化するドローンシステムをご紹介しましたが、本日はドローンではなく自律走行式のロボットが登場したとのことでそちらをご紹介。
「株式会社イクシス」と「安藤ハザマ」が共同で開発したロボットとなりますが、株式会社イクシスでは以前に自律型ではない、手動式での床面のクラックを検知するロボット「Floor Doctor」をリリースされていました。
今回は自律型とのことで、より効率的な作業が可能になると思われます。
検査の自動化、記録書類作成作業の削減により検査業務を効率化
この度、株式会社イクシスと安藤ハザマが「自律走行式ひび割れ検査ロボット」を開発。大空間構造物の床面におけるひび割れ検査において、軽量な走行台車型の検査ロボットが自律走行を行います。
出典:安藤ハザマ
また、同時にAIにより撮影画像よりひび割れを検出し、その結果を自動的に図面に表示できるそうです。
開発背景
大空間の構造物の床面施工におけるコンクリートのひび割れ不具合は、竣工時や引き渡し後、一定期間が経過した後に検査が必要になります。
ひび割れの発生に関しては、材料の配合調整等によって減少の傾向にあるようですが、これまでの検査方法では、必要な知識を有する検査員が近接目視での実測を行って、それを写真や手書きスケッチで記録していましたので、一連の検査業務には多くの時間がかかります。
近年では、AIの画像認識によるひび割れの検出技術が開発されていますが、画像を取得するために人手をともなう作業が必要となります。
さらに取得した画像はその解像度の高さからデータ容量が大きくなっており、ひび割れ検出から記録書類の作成には相当の時間を要するので、作業の効率化が求められています。
開発された自律走行式ひび割れ検査ロボットの特長
そのような背景から、今回開発された検査ロボットは検査の自動化と記録書類の作成作業の削減を可能とし、検査業務の大幅な効率化を実現できるものとなっています。(従来方法と比較して約40%もの時間短縮が可能とのこと)
5つの特長
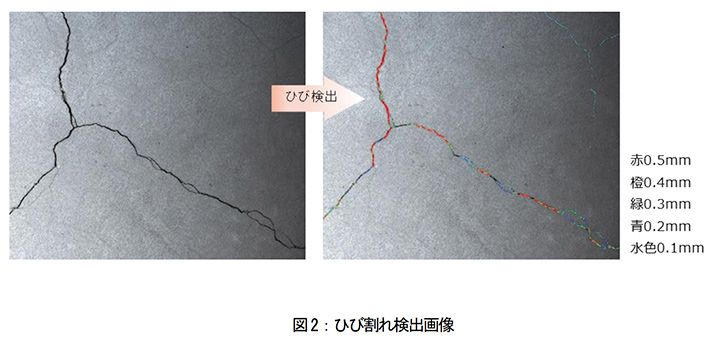
- 検査範囲を指定するだけで床の全面を一定間隔で撮影し、幅0.1mm以上のひび割れを0.1mm単位で自動検出することが可能。また、検出したひび割れはCAD図面上に幅ごと色分け表示して出力することが可能。
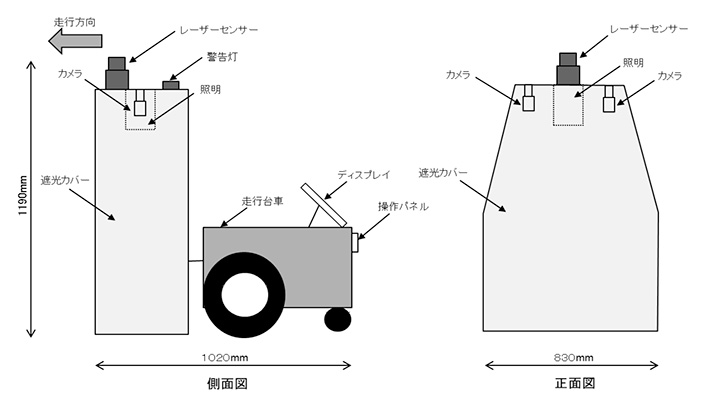
- 検査ロボット専用の撮影装置は遮光カバーに覆われており、カメラと床面の距離やフラッシュライトによる照明の光量・角度が一定に保たれるため、外的要因に左右されずに常に同条件での画像取得が可能。画像認識によるひび割れ検出が高精度で実施できます。
- SLAMによる自律走行を行うことにより、柱やその他の障害物を回避しながら1,500㎡を約6時間で検査可能。これにより大空間構造物における床面の一定範囲を一度に検査できます。
- 撮影画像は無線LANによりパソコンに随時転送され、AIにてひび割れの検出をリアルタイムに行います。撮影画像をサーバーにアップロードして処理を行うという手間や時間が不要になるので、走行後にすぐに検査結果を図面にプロットして速やかな記録書類の作成が可能になります。
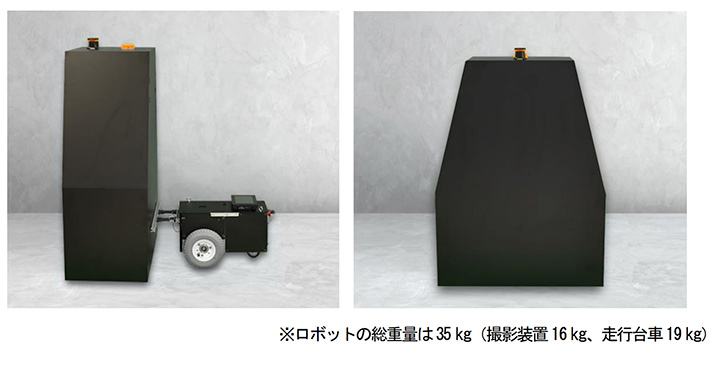
- 検査ロボットとパソコンのみで位置情報の取得からひび割れ検出、図面の表示まで一連の検査業務を行うことが可能。また、検査ロボットは操作が容易で、全体の重量は35kgと軽量。さらに撮影装置と走行台車が分離可能なため、持ち運びも容易。
出典:安藤ハザマ
実機試験の結果
実機での試験において検査ロボットで自動検出したひび割れ箇所と、近接目視で実測したひび割れ箇所を比較したところ、幅0.1mm以上のひび割れに対し、適合率が90%以上となることが確認できたとのこと。
出典:安藤ハザマ
まとめ
今後、このロボットはさらなる改良が加えられ、様々な大空間構造物の現場に導入していくとのこと。
クラックの取得から解析、そして結果の図面へのプロットまで自動的に行えるので、従来方法からかなりの効率化省力化が図れそうなシステムですね。
最近のドローンでの調査でも活用されてるSLAM(レーザーセンサーなどで取得した周辺環境情報から自己位置推定と地図作成を同時に行える技術)を搭載しているとのことで、SLAM技術もかなり使えるものになってきたという印象です。
業界には建物の外壁を打診調査する打診ロボットも登場していますが、そのようなロボットもSLAMを搭載し自動化できるようになったりしそうですね。
スギテックのひび割れソリューションは以下よりご覧いただけます

