概要
東急建設株式会社(以下、東急建設)は東京都市大学理工学部 機械工学科の西部光一准教授および機械システム工学科の関口和真准教授らと、天井効果を利用することで、建築物の天井裏やピットなどの狭所空間において従来型ドローンよりも安定かつ長時間飛行が可能な「天井吸着移動型ドローン」を開発というリリースニュースをお届けします。
天井吸着移動型ドローンとは
これまで、作業員のアクセスが困難な建築物の天井裏やピットなどの狭所空間では、ドローン近傍の上下に存在する壁面による天井効果や地面効果など、壁面とプロペラ気流の干渉によって安定した飛行が難しいことから、需要に反して狭所空間でのドローン利用が活発とは言い難い状況です。
限定的ながら狭所空間向けとして実用化されている手のひらサイズの「マイクロドローン」では、ペイロードが小さくバッテリー容量が不足しているため、作業員の代替として十分な調査・検査時間を確保できない問題を抱えています。
今回、この問題を解決するため、これまではドローンの安全な飛行を妨げるものと見なされていた天井効果を積極的に利用する「天井吸着移動型ドローン」を開発し、これにより、従来よりも30%長い連続飛行時間の確保に成功しました。さらに、天井にプロペラが近接する際にドローン近傍の気流が吹き上がる現象を利用して、上下壁に囲まれた狭所空間での安定飛行と気流乱れの抑制を実現しました。
今後は、本研究成果が屋内環境下や屋外において構造物近傍で飛行するドローンで活用されることを期待しています。
なお、この研究成果は2023年9月11日〜14日に開催された第41回日本ロボット学会学術講演会および2023年10月7日〜8日に開催された第66回自動制御連合講演会において発表されました。
【本研究のポイント】
・ 気流の吹上げと天井吸着を維持した直線移動や旋回が可能な機体の開発に成功
・ 天井吸着飛行によって約30%の消費電力削減効果を確認
・ 気流の吹上げを利用することで、安定飛行を妨げる気流の乱れを抑制
【概要】
作業員の負担軽減を目的とした建設現場での小型ドローン活用が急速に拡大しています。
しかし、作業員のアクセスが困難な建築物の天井裏やピットなどの狭所空間では、ドローン近傍の上下に存在する壁面による天井効果(※1)および地面効果(※2)など、壁面とプロペラ気流の干渉によって安定した飛行が難しいことから、需要に反してドローンの活用が遅れています。限定的ながら狭所空間向けとして実用化されている手のひらサイズの「マイクロドローン」では、ペイロード(※3)が小さくバッテリー容量が不足しているため、作業員の代替として十分な調査・検査時間を確保できない問題を抱えています。
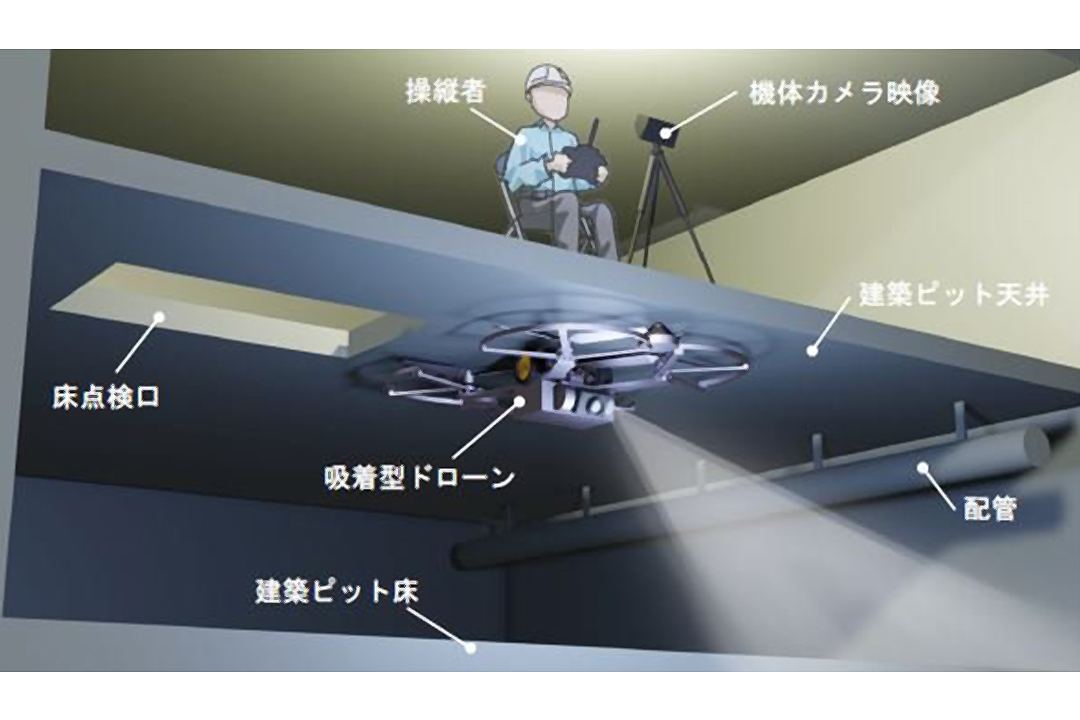
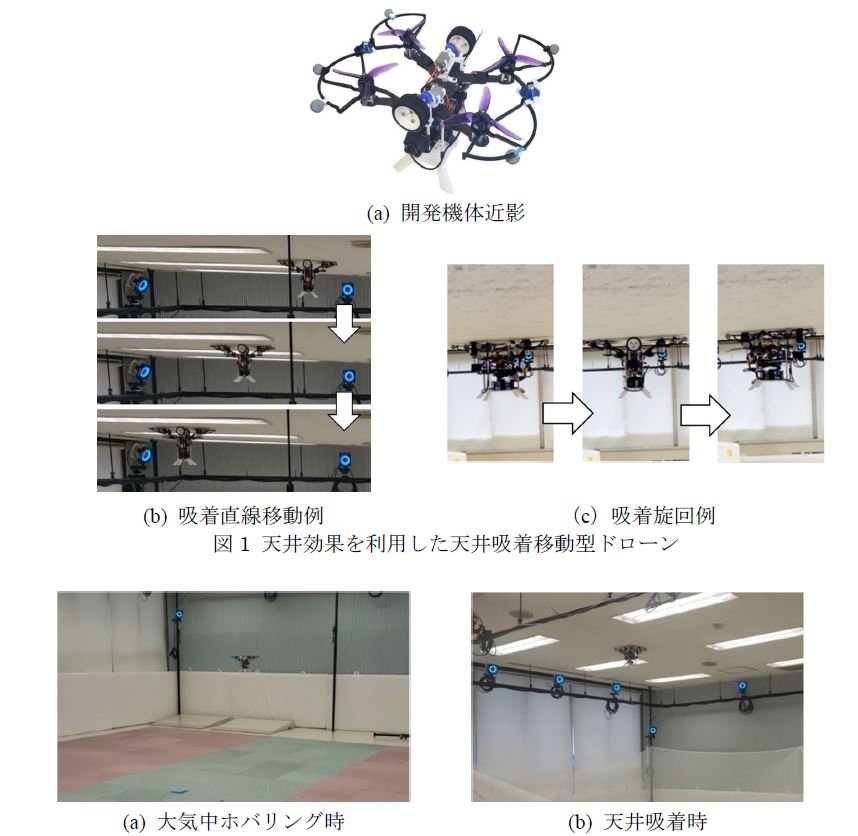
本研究では、これらの課題解決に向けて、これまで機体上部に構造物(上壁)がある場合にドローンの安定飛行を妨げていた天井効果を積極的に利用した天井吸着移動型ドローン(図1)を開発しました。
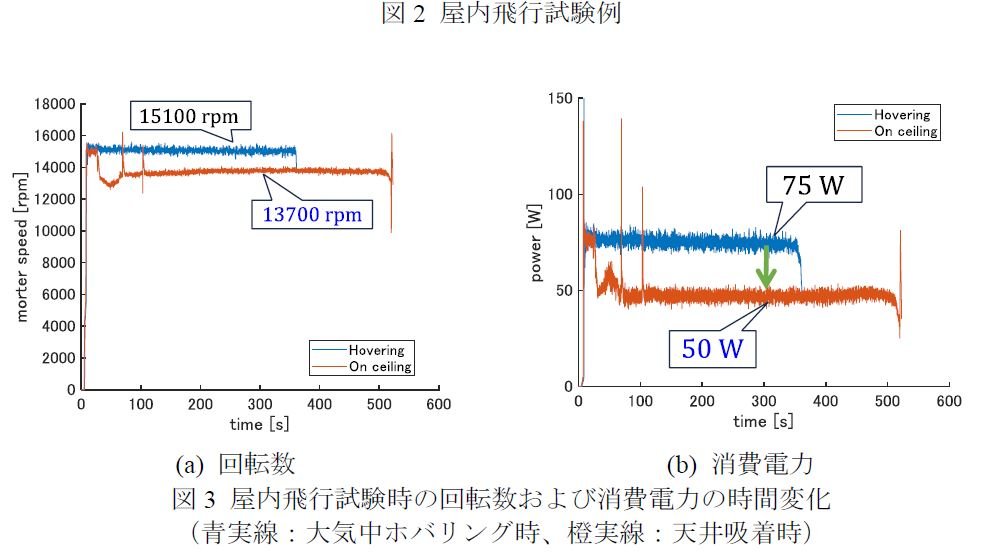
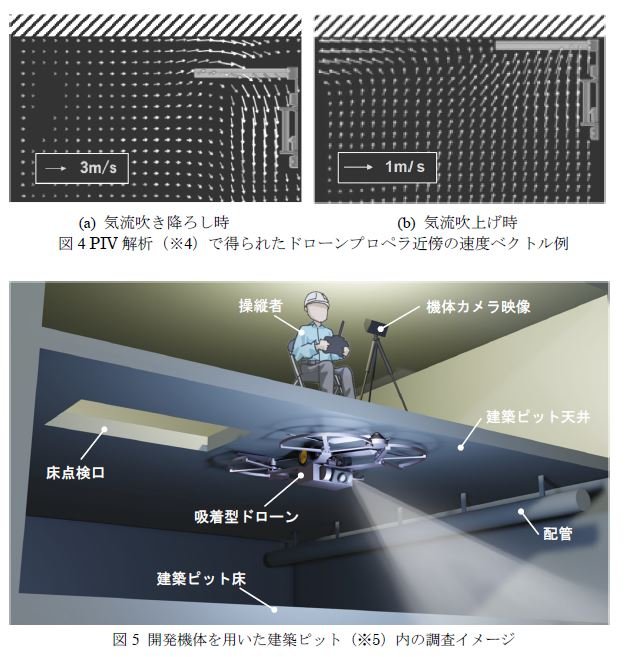
図2に屋内飛行試験で確認された吸着直線移動と吸着旋回例を示し、図3(a)および(b)に機体近傍に障害物が存在しない大気中でホバリングしている場合と天井吸着飛行時のプロペラ回転数と消費電力の時間変化をそれぞれ示します。天井吸着時の方がホバリング時よりもプロペラ回転数が約10%低下することで消費電力が約30%低下し、連続飛行時間が約30%増大することが飛行実験で明らかとなりました。さらに、天井にプロペラが近接するとドローン近傍の気流が反転する現象(図4(b))が発生し、天井裏や空調のダクト内のように機体下部に壁面が存在する場合に作用する地面効果をキャンセルできることを確認しました。これにより、上下壁に囲まれ狭所空間での安定飛行と気流乱れの抑制、および飛行時間の長時間化を実現しました。
図5に開発機体を用いて建築物のピット内を調査するイメージを示します。狭所空間では、オペレーターが機体を目視しながら操縦することは難しく、機体に搭載したカメラからの映像をリアルタイムで見ながら遠隔操縦する方式となることが予想されるため、これまではオペレーターには高度な操縦技能が不可欠でした。一方、開発した天井吸着型ドローンは、車輪駆動により天井面を移動し、気流が反転していることから、従来機体よりも操縦が容易になることが予想されます。また、気流反転によって、吹き降ろし流れが生成されないことから、埃などが舞い上がらずに撮影映像の視認性が向上することも期待できます。
【研究の背景】
東京都市大学および東急建設は、天井などの上壁面近傍で安全に飛行できるドローン技術を開発してきました。これまで、天井効果の作用によって推力上昇が確認されるプロペラ−天井間距離(以下、天井間距離)の範囲では、圧力回復孔を設けたプロペラを開発し、従来比で約20%の推力上昇抑制に成功しています(本学リリース:https://www.tcu.ac.jp/news/all/20230926-53311/)。
一方、本研究では天井効果を積極的に利用する技術を開発しました。ドローンの飛行環境として狭所空間を想定し、より上壁に近接(天井間距離がプロペラ直径の10分の1よりも小さい)、天井効果が強く作用して気流が反転し、推力が急上昇する安定飛行が困難な領域での実用化が見込まれる天井吸着移動型ドローンの開発を試みました。具体的には、天井に吸着し、強く作用する天井効果による気流反転を利用することで、①長時間飛行、②高い飛行安定性、③撮影映像の高い視認性を兼ね備えた新しい機体の開発に成功しました。
【研究の社会的貢献および今後の展開】
上壁への吸着力が大きいことから、屋内環境下に留まらず、橋梁下などの横風による外乱の影響を受けやすい屋外構造物の点検・調査作業への利用も期待されます。
【用語解説】 ※1 天井効果: ドローンが天井のような"上壁"に近づくと、プロペラによって生成される旋回流が上壁と干渉し、ドローンと上壁間の気圧が下がって上昇する力(推力)が増大する効果。同効果が作用し、推力が急増すると飛行制御が難しくなり、上壁に衝突する問題が起こります。 ※2 地面効果: ヘリコプターやマルチコプター式ドローンが地面や床などの"下壁"に近づくと、プロペラによって生成される吹き降ろし気流と下壁が干渉することで、迎角が増加して上昇する力(推力)が増大する効果。 ※3 ペイロード:ドローンが飛行時に搭載可能な機器や荷物の最大積載量。 ※4 PIV解析: PIV(粒子画像流速測定法)とはParticle Image Velocimetryの略であり、作動流体中に混入したトレーサ粒子の挙動をレーザー光源で照射し、高速度カメラにより撮影された粒子画像から気流の速度を非接触で求めることができる流体計測手法。 ※5 ピット:建築のピットは地下に設けられた配管を通すための空間。
【共同研究者】
東京都市大学 理工学部 機械システム工学科 講師 土方 規実雄
東急建設株式会社 技術研究所
【研究協力者】
東京都市大学大学院 総合理工学研究科 機械専攻 中村 剛
東京都市大学 理工学部 機械工学科 和田 直人
東京都市大学 理工学部 機械システム工学科 相田 友瑚、横田 祥吾
おわりに
この天井吸着移動型ドローンの挙動で、ライターがふと思い出したのが、下記のリンク動画ですが、天井に沿えるなら、外壁にも沿える挙動はできるのではないかと、思う次第です。
確かにドローン利用前にも外壁調査ロボ(昇降ラジコンぽい)はこれまで登場してきていますが、広範囲を短時間で調査完了となると、まだまだアナライズ範囲がその調査ロボの幅の大きさの範囲にとどまるのが現状でしょう。しかし、局所調査には高精度な調査データを取得できる環境が整いつつある記事と感じました。
参考・関連情報・お問い合わせなど
□東急建設株式会社
リリースニュース:https://www.tokyu-cnst.co.jp/topics/2532.html