
こんにちは。近年の土木・建設業界では、ICT等の施策の建設現場への導入を図ることで魅力のある建設現場を目指す取り組みであるi-Constructionが進められています。
各社、センシング技術やロボティクス技術を取り入れた効率化を進めており、中でも自律運転の技術はあらゆる面で活用されつつあります。そんな中で株式会社熊谷組(以下、熊谷組)では、それらセンシング技術やロボティクス技術を取り入れた建設機械の試験的導入などの、生産性向上を目的とする取り組みを進めています。
今回、振動ローラ作業の効率化ということで発表されたのが、酒井重工業株式会社、JIG-SAW株式会社の2社と連携して、熊谷組の施工現場にて自律走行式振動ローラを活用した実証実験が行われたものとなります。
熊谷組と酒井重工業、JIG-SAW、 自律走行式振動ローラの実証を実施
この実証実験では、自律走行の性能精度の確認が目的となっていたそうで、予め生成した目標の経路に対してどの程度追従できているか?という部分の確認を行ったそうです。

出典:熊谷組
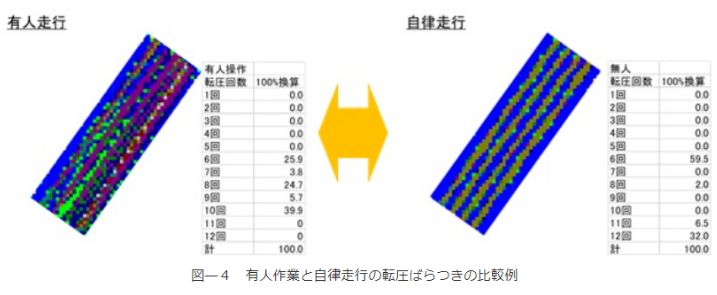
結果、目標の経路からズレていたのは最大で20cm程度という結果となり、経路の追従性能が高いことが確認できたそうです。さらに自律走行と有人作業を比較するために試験エリアの中で規定転圧回数を6回(ラップ箇所は12回)と、横断方向に5レーンを設定。
工区の全体面積を100%とした場合、規定6回で転圧された面積は、有人の作業で25.9%、自律走行では91.5%となり3.5倍向上したそうです。また、有人作業では6レーンの転圧だったところ、自律走行ではより正確に転圧ができることから、設定通り5レーンの転圧となり有人作業より20%の作業を省力化できることが証明されたとのこと。
出典:熊谷組
自律走行式の振動ローラは、GNSSアンテナや制御PC、無線装置、安全装置と各種備えていることで、予め設定した目標経路に沿って自律走行で転圧できるという機能を実現。
ちなみに目標の経路データは、オフィスからでも現場からでも生成することが可能とのことで、クラウド上でアップロード・保存ができます。振動ローラのオペレータは、その生成された経路のデータを現場でダウンロードして施行準備を行い、安全確認後に施工開始を指示。
振動ローラは開始指示に従って施工を開始し、設定された転圧作業を行い終了地点に到達すると自動停止するようになっています。概要は以下

出典:熊谷組
現場は現場ごとに施工条件が異なるということがあります。熊谷組ではそのような様々な施工現場に適応したシステム開発の取り組みを3社で共同して進めていくとのこと。
今後はシステム全体の運用を簡便にしていくことで、自律走行をオペレータのみで判断、操作できるシステムとして、より簡単に施工現場への導入を可能にしていくとしています。
□株式会社熊谷組
熊谷組と酒井重工業、JIG-SAW、 自律走行式振動ローラを活用した実証実験を実施
リリース記事:https://www.kumagaigumi.co.jp/news/2021/jig-saw.html