
記事のポイント
・西松建設株式会社(以下、西松建設)は、株式会社カナモト(以下、カナモト)と有限会社浅草ギ研(以下、浅草ギ研)、ジオマシンエンジニアリング株式会社(以下、ジオマシンエンジニアリング)と共同で、ホイールローダーをローカル5G通信によって遠隔操縦させるシステムを開発した。
・システムは山岳トンネル坑内にて遠隔施工実証実験が行われた。28GHz帯のローカル5G通信が山岳トンネル坑内で適用されたのは、国内でも初という。
国内初適用。トンネル坑内でのローカル5G通信を使用した遠隔操縦
西松建設は、カナモト、浅草ギ研、ジオマシンエンジニアリングと共同で、山岳トンネル堀削時に岩石や土砂をダンプカー等に積み込む建機であるホイールローダーをローカル5G通信によって遠隔操縦させるシステムを開発し、実際にトンネル坑内にて遠隔施工の実証実験が行われた。28GHz帯のローカル5G通信を山岳トンネル坑内に適用したのは、これが国内で初という。
今後、国内の労働人口減少はさらに加速する見込みで、建設業界においても施工などの省人化・無人化の取り組みは喫緊の課題となっている。このような状況の中、複数の特殊重機による複雑な作業が必要となる山岳トンネル工事においても、自動化・無人化技術の開発は推進させていく必要があり、西松建設ではトンネル施工の各作業における無人化(遠隔操作)・自動化施工に関する要素技術の開発を進めており、今回のホイールローダの遠隔操作システムもその取り組みのひとつだ。
システムの概要
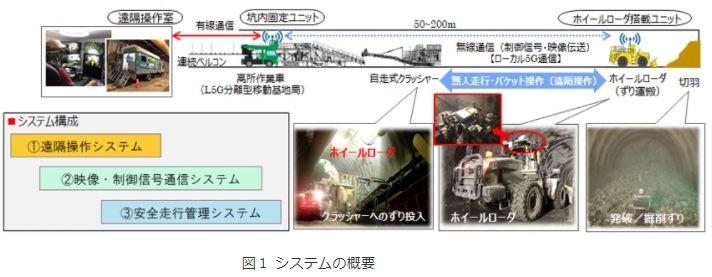
ローカル5Gを使用したホイールローダー遠隔操作は、遠隔操作システム、映像・制御信号通信システム、安全走行管理システムで構成される。各種システムの詳細は以下となる。
1.遠隔操作システム
システムは運転操作に必要な装置で構成。ホイールローダの運転は、ステアリング、ブレーキ・アクセルペダルおよびアーム・バケットレバーの操作によって行われる。これらの操作が無線受信によって機械的に作動させるための遠隔運転制御装置がホイールローダに外付けされている。
出典:西松建設
また、遠隔操作を行う遠隔操作室には、実機と同じ仕様の遠隔操作コクピットと9画面のモニターが配置され、画面を見ながらコクピットから遠隔操作を行う。遠隔操作コクピットでは、実際の運転時の実機の振動や作動音も伝わるようになっており、実機運転とほぼ同じ環境下で遠隔運転が出来るようになっている。

出典:西松建設
2.映像・制御信号通信システム
システムは、遠隔操作に必要な映像・制御信号をローカル5Gで通信させる装置で構成。ホイールローダには、7台のフルHD車載カメラと5G端末、制御盤等で構成される「ホイールローダ搭載ユニット」が設置されている。また、ローカル5Gアンテナを高所作業車に設置したローカル5G分離型移動基地局や、坑内カメラ等で構成される「坑内固定ユニット」を切羽後方に配置。

3.安全走行管理システム
遠隔操作時には安全走行を確保するための、ホイールローダの運転を自動的に緊急停止させるシステムが備わっている。緊急停止は、ホイールローダへの人の異常接近をAIが認識した場合や無線環境にトラブルが発生した際に自動的に作動するが、コクピットからや携帯式のスイッチから緊急停止を手動で作動させることもできるという。また、ホイールローダ周辺の安全状況や坑内設備との接近は、遠隔操作室に設置された全周囲モニターによって確認することもできる。
このシステムの実証実験は、国土交通省北海道開発局小樽開発建設部の発注である「一般国道5号 仁木町 新稲穂トンネルR側仁木工区工事」で行われた。実験ではホイールローダの坑内走行、堀削ずりの運搬やクラッシャーへの投入など、実施工と同様の作業を遠隔操作にて実施。

出典:西松建設
この実証実験で、運転操作に大きく影響するような映像伝送の遅延や通信不具合などは起きず、狭隘である坑内においても有人運転に近い高速走行や、堀削ずりの積み込み、クラッシャー投入時の微妙なバケット操作を遠隔によって実施することができたという。
出典:西松建設
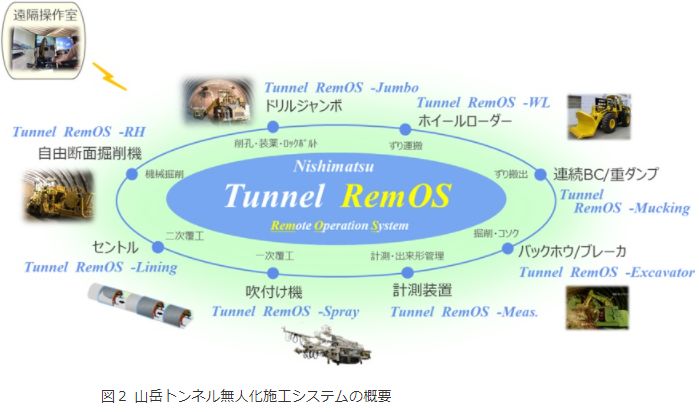
今後、西松建設では現場試行を継続しながら改良し、早期の実用化を目指している。また、今回の遠隔システムを始めとした山岳トンネル施工に使用する各重機の無人化技術を効果的に組み合わせた「山岳トンネル無人化施工システム(Tunnel RemOS)」の構築を急ピッチで進めているという。
□西松建設
国内初。トンネル坑内においてローカル5Gを使用したホイールローダの遠隔操縦を試行
リリース記事:https://www.nishimatsu.co.jp/news/news.php?no=NDg4
この件に関するお問い合わせ
西松建設 各種お問い合わせ:https://www.nishimatsu.co.jp/news/news.php?no=NDg4