
この度、株式会社安藤・間(以下、安藤ハザマ)がコベルコ建機株式会社(以下、コベルコ建機)と、油圧ショベルの自動運転技術の確立に向け実証実験をおこなった。
安藤ハザマは、建設現場の生産性向上を目的としICTを活用した建設機械の自動運転システムの開発に取り組んでいる。現場の施工では数種類の建設機械を使用する必要があり、これまでに振動ローラとブルドーザの自動運転システムを開発してきた。
現場で広く使われている油圧ショベルについても自動運転システムを技術開発していく必要があったが、その開発には高度な技術が必要となることから、建設機械メーカーとの共同研究を検討してきたという。
一方、コベルコ建機は「誰でも働ける現場へ KOBELCO IoT」をテーマとしたICTロードマップを策定し、その実現に向け中長期に研究・開発を進めている。そのロードマップの柱のひとつとなる建設機械の自動運転技術を確立することで、建設現場の生産性向上、現場無人化による本質的安全の確保に取り組んできた。
共同研究の内容
両社は油圧ショベルの自動運転推進に向けた研究開発促進のため、互いの強みを活かし共同研究を行うため2019年4月に共同研究に関する協定を締結。
コベルコ建機では主に自動運転の油圧ショベルシステムの開発。安藤ハザマではそれを現場に適用するための施工と安全に対する管理システムの開発、現場での運用ルールを担う。
両社は本格的な共同研究に向けた実証実験を2019年の秋に実施。安藤ハザマが施工中である国内ダムの建設現場において、タブレット端末を利用したティーチングとプレイバック(※)による油圧ショベルの単純な自動運転作業の実証を行った。

出典:安藤ハザマ
それを踏まえ2020年11月に安藤ハザマの技術研究所にて、重機オペレータ1名が通常の油圧ショベルを操作しながら自動運転ショベルの運転管理を行うという実証実験を実施。その具体的内容は、自動運転ショベルが土砂の堀削からダンプトラックへの積み込み、その土砂の供給を通常の油圧ショベルで手動運転で行うというもの。
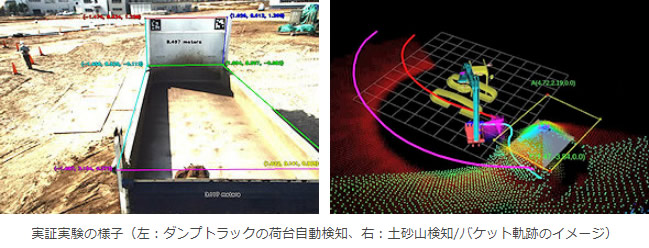
この実験では、自動運転で必要な要素技術の「認知」「判断」「操作」等のうち、「認知」部分にAIを適用されることにより、物体を認識しその距離を測定するとともに、その情報から目標位置を自動調整することで現場の状況変化に対応できることが確認されたという。
出典:安藤ハザマ
またプレイバック中の自動運転状況は、作業者がリアルタイムにタブレット端末で確認が可能だ。またそれに加え、実験ではバケット爪先の3次元軌跡をリアルタイムに計測。計測データは将来的に自動運転の監視や施工状況の管理に利用可能と考えられている。
両社はこの共同研究の成果をもとに、今後も自動運転の高度化と実用化に向けた協力を行っていく。
(※)ティーチングとはプログラム作成のため重機の動作を記録すること。プレイバックとはその記録した動作を再生すること。