
こんにちは。ロボット技術の進歩が目覚ましい昨今、ロボット単体での進化もそうですが、他の技術と組み合わせることでより活用範囲が広がります。
これはロボットだけでなくドローン+AIだったりドローン+ARだったりと、最近のソリューションのほとんどはテクノロジーの組み合わせから生まれているものが多いです。
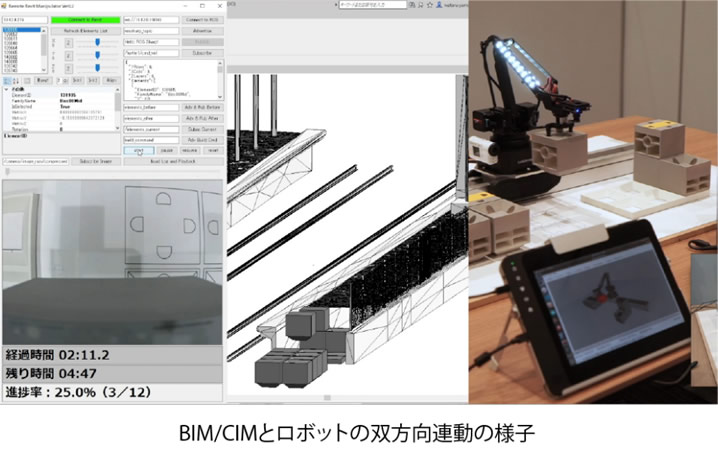
本日は「株式会社イクシス」と「JR東日本」が共同開発したという3次元モデリングであるBIM/CIMと、ロボットを連動させ、現場の遠隔操作や遠隔監視をできるようにしたシステムが開発されたとのことなので、そちらをご紹介。
BIM/CIMとロボットの連動で遠隔操作・監視、出来高管理の一元化
イクシスでは、鉄道工事などへの遠隔技術の活用について、BIM/CIM(Building Information Modeling/Construction Information Modeling)モデルと、ロボットの連動により、鉄道工事の現場が持つ狭隘さや夜間短時間等の特異性を想定した遠隔操作及び遠隔監視、出来高管理を一元管理できるシステムを開発。
このシステムによってBIM/CIMで計画された鉄道工事を、現場のロボットが遠隔で作業して、その出来高や出来形をBIM/CIM上で、遠隔地からリアルタイムに把握することが可能になるそうです。
出典:イクシス
近年、現場での技術者・技能者不足が益々加速してくるとされている建設工事においては、このシステムを活用することにより、鉄道建設工事の省力化を目指しコロナ時代におけるDX化を推進していくとのこと。
※DXとは:デジタルトランスフォーメーションの略で、デジタル技術で人々の生活をより良いものにしていくという意味。デジタル変革とも言います。
開発された遠隔操作及び監視、出来高管理一元化システム
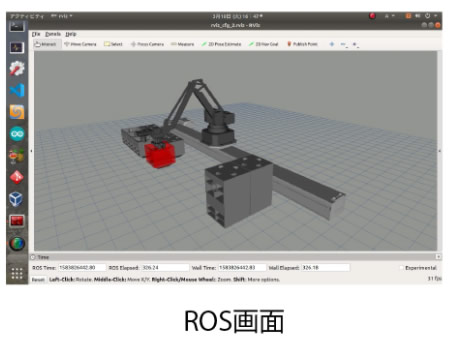
同社は鉄道建設工事における駅のプラットホーム建設をブロック積立工法とロボットによる遠隔操作により実現し、BIM/CIMとROS(Robot Operating System)を双方向に連携させることにより以下システムを実現。
a:ロボットの位置姿勢情報とBIM/CIMモデル空間との座標マッチング
b:BIM/CIMモデル空間での資材置き場(始点)から建設箇所(終点)への資材運搬のルート設定
c:指定された資材ルートからROS上でのロボットの行動計画生成および動作
d:ROS(Robot Operating System)によるロボット動作および、ロボット動作により運搬された資材の位置姿勢情報のBIM/CIMへのリアルタイムでの反映
e:ロボットに搭載された現場カメラ映像のROSパッケージによるリアルタイム配信
f:建設開始・停止等の操作および進捗率等のグラフィカルなユーザインターフェース
以上、これらシステムの有効性を確認するために小型試験機を開発しその有効性が確認されたそうです。同社では、今後の展開としてこの開発した遠隔操作、遠隔監視、出来高管理一元化システムをさらに拡張させ、実現場でのこの技術の有効性を確認していくとのこと。
出典:イクシス
まとめ
このシステムですが現段階では小型試験機での実証成功となっていますが、実現場での適用もそう遠くない内に実現されそうですね。
今は建設業界に限らず様々な業界で技術者不足が課題となっているような状況です。また、今年の新型コロナウイルス感染症により、働き方の変化を余儀なくされる企業も増えている状況の中で、生産性や競争力を高めていく上でも技術のDX化は喫緊の課題となっています。
余談ですがDXには2通りの言葉があり一つは先にも書いた「デジタルトランスフォーメーション」とあと一つは「デベロッパーエクスペリエンス」です。デベロッパーエクスペリエンスとは、技術を開発する使用する側がスムーズな開発等に取り組める環境を整えるという意味になります。
DXはこの両輪で動くことが大事と言われており、単に新しいテクノロジーを取り入れるだけでなく、デジタルを活用する人材の働き方等の部分までを考えてこそのDX推進となります。現状を変えるのを恐れたりコスト削減のために何もしないという選択はこれからの時代厳しくなりそうですね。