
こんにちは。ARと聞けば拡張現実が思い浮かびますが、ARにはQRコードのようにそれにカメラをかざすことでコンテンツを表示できるARマーカーというものがあります。
コードをカメラ等で読み取って、コンテンツを表示することができるという点で同じような物にはなりますが、両者は以下のように結構大きな違いがあります。
ARマーカー
【アプリの有無】アプリのダウンロードが必要
【マーカーデザイン】基本的に自由。画像であれば何でも可。
【表示コンテンツ変更】可能。
【かざした後の挙動】3Dオブジェ、動画、画像等様々なコンテンツを表示可能。
【GPS連携】可能。指定エリアで表示できる。
【時間連携】可能。指定日時で表示できる。
【ランダム表示・再生】可能。ARをかざしたタイミングで表示するオブジェが異なる。
QRコード
【アプリの有無】アプリのダウンロードは不要。
【マーカーデザイン】デザインはQRコードのみ。
【表示コンテンツ変更】不可。
【かざした後の挙動】URLへのリンクのみ。
【GPS連携】不可。
【時間連携】不可。
【ランダム表示・再生】不可。
以上のような違いとなります。ARマーカーは専用アプリが必要だが(不必要な物も出てきている)、QRと比べてデザインの自由度や表示出来るコンテンツの幅は広く、GPSなどの位置情報にも対応しています。
今回はそんなARマーカーを用いて、非GPS環境でもドローンの制御が行えるという技術が開発されたとのことなので、そちらをご紹介。
GPSのない環境でARマーカーを使いドローンを3次元空間で制御
「株式会社アトラックラボ」と「国立大学法人 佐賀大学」の共同開発となるこの技術は、ドローンにARマーカーを搭載し俯瞰のカメラによって認識させることで、ドローンの3次元オドメトリを行います。
[aside type=”boader”] ※オドメトリとは自己位置推定のことで、GPSやSLAM等の複雑な処理を必要としない比較的簡単な位置の推定方法で、例えばロボットなどの場合、タイヤの回転角や移動距離などから現在位置を推定するものです。[/aside]
さらに異なる場所に設置された複数のカメラをまたいで位置情報を計算する事ができるため、長い廊下など一箇所のカメラではカバーできない広範囲の制御を可能にしているとのこと。
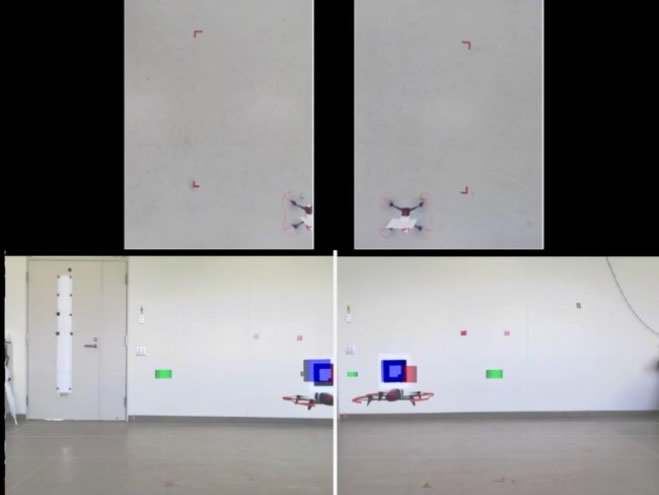
上画像、下の2つの画像はドローンに取り付けたARマーカーを認識するための2つのカメラ映像。この映像情報によってドローンの制御を行います。
上2つの画像は、ドローンの飛行を確認するために天井から床面に向かって取り付けたカメラ映像。こちらはドローンの制御には用いないとのこと。
他方法との大きなアドバンテージ
このARマーカーを使用した制御アルゴリズムは、佐賀大学の佐藤和也教授が開発しドローンに実装。株式会社アトラックラボではドローンの自律制御や通信などを担当しているそうです。
従来では数cmレベルの制御を行うためには、LiDARやステレオカメラといった機材が必要でしたが、今回の方式では安価なWEBカメラなどが活用できるために、コスト的なアドバンテージが大きいとのこと。
今後はドローンだけでなく、ビニールハウスで自律運転するローバー(車両型ロボット)の制御など、コストの制限が大きい農業分野などに応用していくそうです。
まとめ
LiDARやSLAMによる位置推定はこのブログでも何度かご紹介したことがありますが、ドローンに搭載したARマーカーを活用するという全く新しい方法となり、それなりにあると思っていた誤差に関しても、数cm程度という高精度なものとなっています。
コスト的な部分でも市販のWEBカメラが使えることにより、安価に抑えることができるのも大きなメリットですね。今後このARマーカーでの位置制御技術もひとつの有力な方法として定着するかもしれません。