
こんにちは。ドローンを自律飛行させるために、基本的にはGPS通信が欠かせない機能となりますが、GPSを活用するためには安定した通信環境が必要です。
屋外であれば然程問題はありませんが、施設内部や地下空間、トンネルなどでは衛星からの電波が必要となるGPSでは自律飛行を実現させることは困難となります。
そんな問題を解決するために、この度「関西電力」が火力発電所の内部をドローンの自律飛行で点検できる技術を発表しています。
煙突内部点検で活用する自律飛行ドローンの開発
ドローンによる内部空間の自律飛行を実現するため、昨今ではSLAMという自己位置推定と環境地図作成を同時に行う技術が活用されています。SLAMを活用することで、ドローンやロボットなどが自らの位置を知ることができます。身近な所ではルンバなどのお掃除ロボットがそれにあたります。
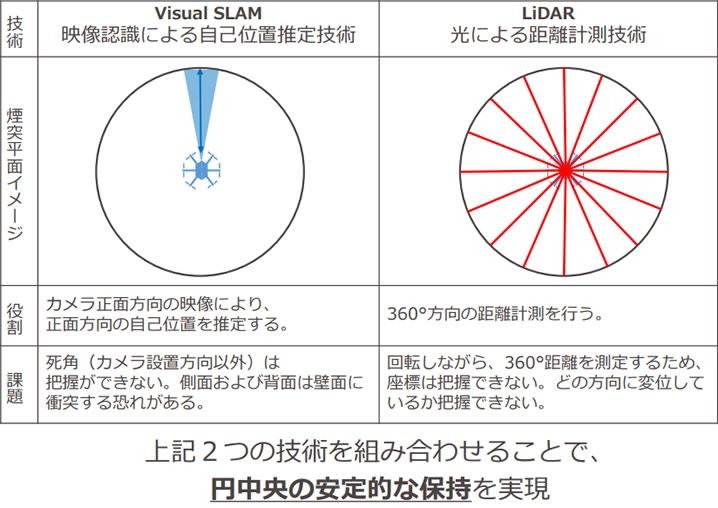
SLAMにはカメラなどの画像を中心に処理する「Visual SLAM」と、距離を測るレーザーセンサーを使用した「LiDAR SLAM」の2種類がありますが、関西電力ではこれら2つのSLAMと気圧センサ等を組み合わせた技術で、煙突内部等の自律飛行点検を実現するドローンを開発。
背景
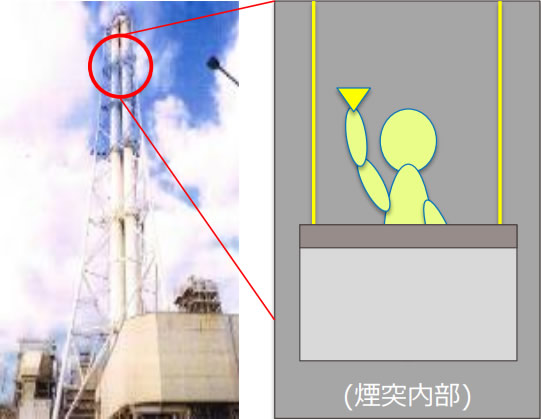
火力発電所にはそれぞれ高さ最大200mほどの煙突が備わっていますが、劣化の早期発見のために、従来の点検業務では煙突内部にゴンドラ足場を設置し、作業員による目視で点検が行われています。
この従来方法のメリットは詳細な点検ができることですが、点検が高所での作業となることによる安全上のリスクや、点検業務に数週間の時間がかかってしまっている等の課題があるのが現状です。
出典:関西電力
自律飛行ドローンの開発概要
煙突内部ではGPSが届かないため、ドローンを自律飛行させることは困難です。そこで同社では、GPSが届かない円筒形の空間内でも、機体の位置を推定できる技術(特許出願中)を国内で初めて開発。

出典:関西電力
煙突内部で安定的に自律飛行させるドローンの開発に成功しています。このドローンを活用することで、高所点検を行う頻度を減らすことができるため、点検作業をより安全に行えるようになります。
また、1回あたりにかかる点検期間を約90%短縮でき、点検にかかる人員を大幅に削減できることから、50%以上の収支改善効果があると見込まれているそうです。
ドローンに採用された技術
1.水平制御(X,Y)内壁位置を測定し中央に制御する
・Visual SLAM:水平制御カメラ搭載
・LiDAR:LiDARセンサー搭載
出典:関西電力
2.高度制御(Z)高度による気圧差により制御
・気圧センサ:ドローンに標準搭載
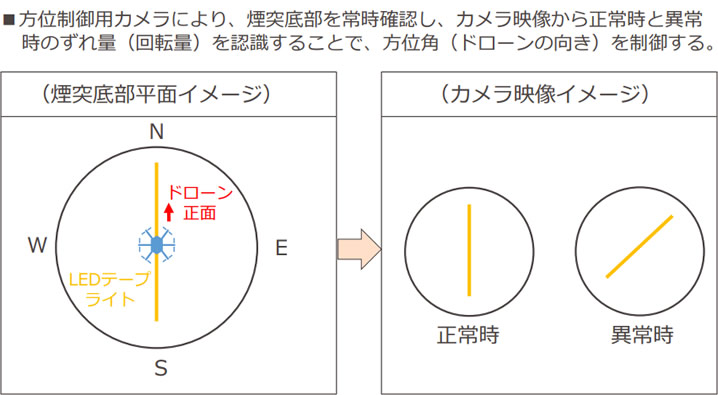
3.方位角制御(Θ)ライトのずれ(回転量)により制御
・Visual SLAM:方位制御カメラ搭載
・LEDテープライト:煙突底部に設置
出典:関西電力
点検方法
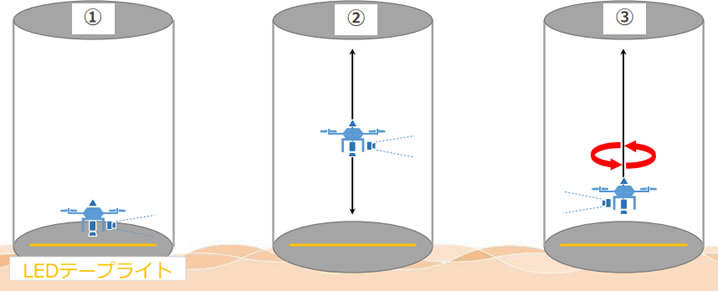
1.LEDテープライトを煙突内部に添え付け、煙突内部にドローンを搬入。
2.ドローンは円中央を保持しながら、一定速度かつ一定の方位角を保ちながら自律飛行で上昇し、煙突内部の周方向のうち一定の範囲を撮影。上部撮影後に降下する。
3.ドローンが底部に到達すると、機体を回転させ、異なる範囲(方位角)での撮影を開始する。
4.1~3を繰り返し、全周撮影。
出典:関西電力
まとめ
通常で約3週間かかっていた点検。しかも1日あたり10名の作業員が動いての3週間であるため、点検費用も結構な負担となっていたそうです。
この自律飛行ドローンを使うことで作業日数は約1日程度、費用は50%以上が削減されるとのことで、いつもながらドローンの作業効率の良さには驚かされますね。