
オペレーター一人で複数台の運転管理を可能にする技術
こんにちは。4月から新しい環境での生活となった新社会人の方々は多いと思います。弊社も昨日より本社と東京支店に新入社員の方を迎えております。
社会人生活の中で一番大変なのがこの新入社員の最初の時期だと思います。慣れない環境の中で毎日緊張することが多いと思いますが、焦らず気張りすぎずコツコツとやっていきましょう。
さて、本日は熊谷組さんが先週プレスされていた、AI制御を活用した不整地運搬車(クローラーキャリア)を自動で走行させる「自動走行技術」を開発されたという話題。
自動走行にすることで安全性の向上と、オペレーターが一人で複数台の運転管理をおこなうことが可能になることで、生産性の向上が図れます。

出典:熊谷組
この技術は熊谷組と、特許技術「人工脳SOINN」を活用した各種機器・装置・情報システムの知能化などをおこなう、SOINN株式会社との共同開発となります。
開発の背景
一般的土木工事の土砂運搬作業は、土砂積載場所から搬出場所まで、ほとんど同一の経路を往復する繰り返し作業を行っています。
作業は単調な繰り返し作業になりますが、運搬経路から逸脱したり車両の離合などの危険があり、運転手の疲労蓄積や集中力の低下を原因とする事故の危険も潜んでいます。
そのような現状から、熊谷組では土砂の運搬作業の安全性と生産性の向上を目的とし、この自動走行・自動AI制御技術の開発に至っています。
技術の概要
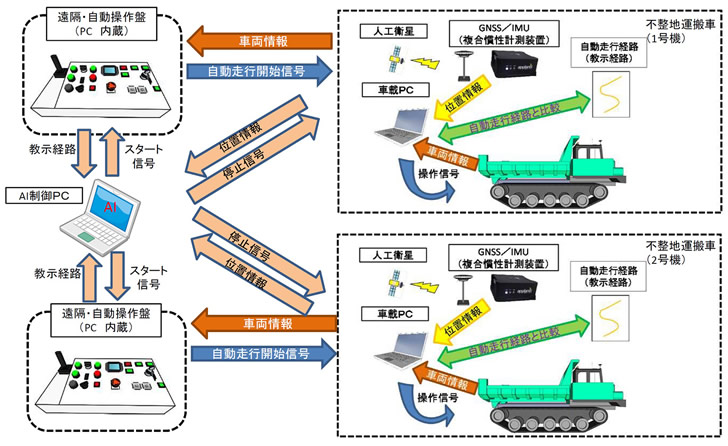
この開発されたAI制御技術は、運搬車の自動運転技術とAIでの制御を組み合わせたもので、運搬車2台以上のスムーズな運行とPCによる人の介在を削減する省人化が可能となります。
出典:熊谷組
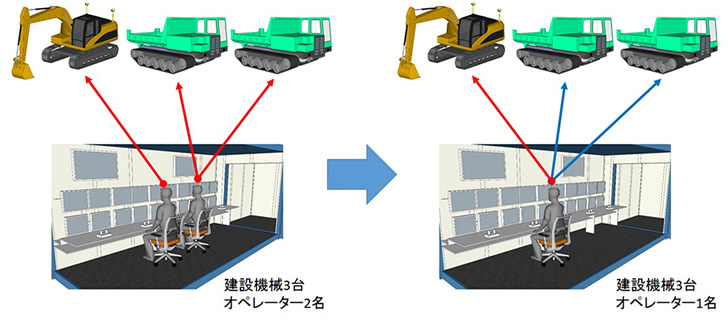
従来は土砂積載の遠隔操作をおこなうオペレーターの他、衝突などの安全確認を行いながら運搬車の自走走行を行うオペレーターが1名必要でした。
出典:熊谷組
しかしAI制御を導入することで衝突等の監視作業が不要になるので、土砂の積載から土砂搬出までの一連の作業をオペレーター一人で行うことが可能となります。
自動走行技術の内容
運搬車の自動走行は、最初にオペレーターの運転席から離れた操作室で走行状況をカメラの映像で確認しながら、積載場所から搬出場所まで遠隔操作を行います。その操作内容をコンピュータに記憶させ運搬車を自動的に走行させるものとなっています。

出典:熊谷組
AI制御技術のフロー
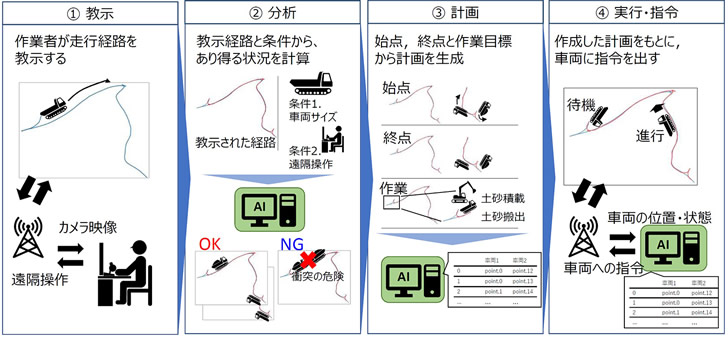
1.教示ステップ
自動走行を行うため、予めオペレーターがカメラ映像で走路を確認しながら教示運転を行い、教示経路のデータを作成。これは自動走行の手法と同様の方法で、オペレーターによる安全確認を行うものです。
2.分析ステップ
次に教示経路を車両サイズ・遠隔操作といった条件に基づいて、全ての複数車両の走行位置関係を算出。安全な位置関係や衝突可能性のある位置関係をAIによって計算して、安全な状態のみを選定。
3.計画ステップ
AIでは、与えられた経路の始点・終点の位置、土砂積み込み、土砂廃棄といった作業目標を考慮し、全ての位置関係の状態から、最もコストと時間が最小になる効率的な計画パターンを生成。
4.実行・指令ステップ
ステップ2,3によりAIでの運行計画パターンが生成され、オペレーターは操作盤のスタートスイッチを押すだけで、複数台の運搬車が常時AIによって進行・停止の判断が行われ、衝突することなく効率的に進行・待機をおこない所定の作業目標を達成する運行を行います。
出典:熊谷組
AI制御の効果
・運行監視要員の削減
AIでの運行制御によって運搬車の衝突等の安全確認作業がなくなり、監視要員が要らなくなる。
・積込機械オペレーターの負担削減
バックホウでの積込や整地などの作業に専念できるようになる。
・運搬機械の負荷低減
運搬機械の速度が平準化するので、燃費効率が向上。
・運搬機同士の接触事故防止
専用センサーがなくても運行管理で接触を防止できる。
・複雑な経路、長距離化にも対応
AIで制御するため経路が複雑で長距離なものでも対応可能となる。
まとめ
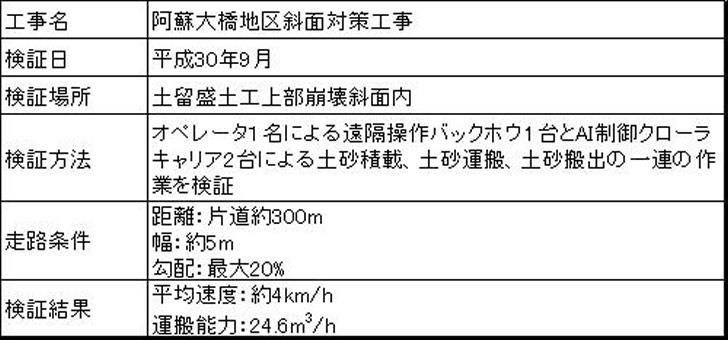
この技術は実際の現場作業にて実証実験されており、以下のような検証内容と結果になっています。
出典:熊谷組

出典:熊谷組
鹿島建設さんでは今後AI制御技術をさらに向上させ、本格的な運用に向けて準備を進めるとのこと。AIはデータが多ければ多いほどさらに精度が向上し幅が広がりますので、実運用時にどれだけ進化しているか期待できそうです。
現場での重機や機器関係もセンサー無しでAIが制御できる時代、人手不足のこの時代に大きな力となりそうですね。